I’ve finally got differential privacy for Gaussian processes on pip.
pip install dp4gp
Details and notes are in the development repo, and the paper it is based on is here. Although since then I’ve introduced inducing inputs, which appears to massively improve the results (see also presentation). The figures below demonstrate the scale of the DP noise added without and with inducing inputs.
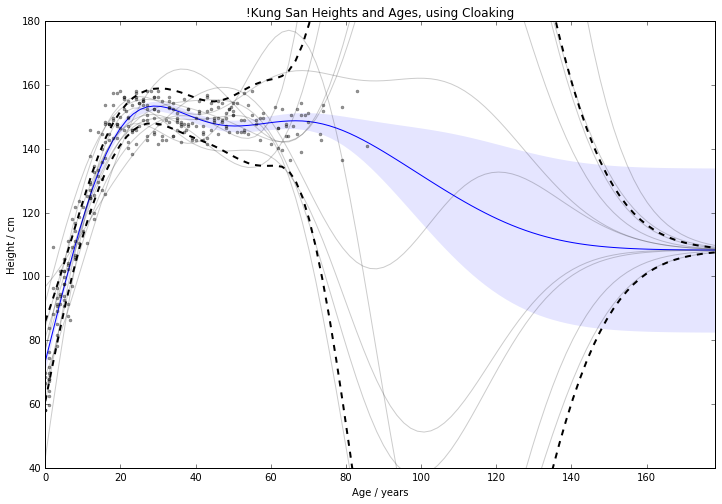
Standard cloaking method
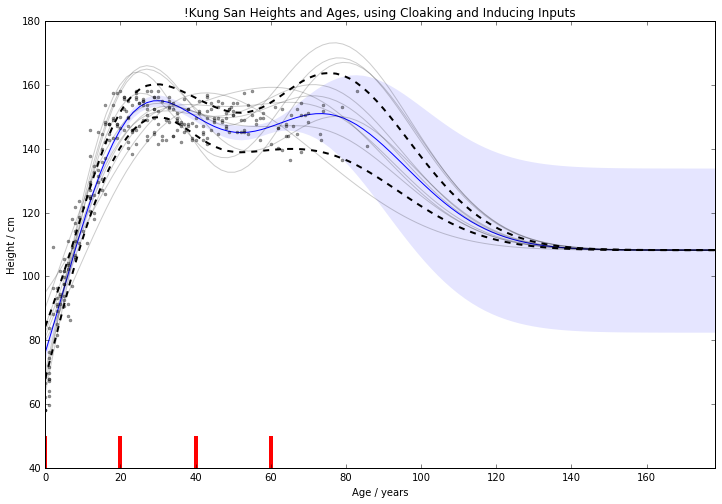
Cloaking method with inducing inputs