Outside of my university work, building a bumblebee tracking system is my main hobby ‘research’ project. A snippet from a draft paper,
Researchers studying bumblebees currently are unable to track the bee’s movement outside the nest without the use of prohibitively expensive radar tracking systems (Goulson 2003) which, besides their cost, have limited range and only work for flat landscapes with few obstructions. Proxies for bee tracking include mark and recapture to estimate their range, although this is often bias by the location of the observers (Schaffer 1996).
An ability to track bumblebees has three important benefits: Firstly it gives conservationists valuable information regarding foraging and mating range and behaviour, which will inform habitat management (for example in avoiding fragmentation). Secondly, it allows researchers to tag and then follow workers back to the nest, allowing the nests of rare species to be found and studied. In particular the recent reintroduction of Bombus subterraneus would greatly benefit from such a technology, which would allow researchers to count nests and inspect them for indicators of reproductive success and provide insight into the habitats most suitable for nest building in this species. Thirdly, the method could be combined with other experiments, such as the ongoing investigations into the effect of neonicotinoid exposure on navigation.
Hypothesis
Can an aerial camera combined with retroreflective tags track bumblebees?
Method
A compact camera and flash are mounted (with control electronics) on an tethered balloon platform, approximately 100m above the ground. A retroreflective material is attached to the back of the bumblebee to be tracked. Every 2-5 seconds two photos are taken (with and without the flash). A short exposure time (1/1000s) is used, made possible by the in-lens shutter in the compact camera. The retroreflective patch on the bee reflects the flash’s light back towards the camera, causing the reflector to appear as a bright spot against a relatively dark background. The images are sent to a laptop on the ground (via a raspberry pi and wifi) where software (python) aligns the two images and then subtracts them. The retroreflective dot is revealed as the brightest point in the image, which is automatically identified.
Progress & Development
2015: Version 1
I started with a compact camera. To make this work I needed a servo to press the trigger and a pair of relays to connect/disconnect the USB and the flash to the camera (by disconnecting the USB the camera went into shooting mode, reconnecting allowed me to copy the images).
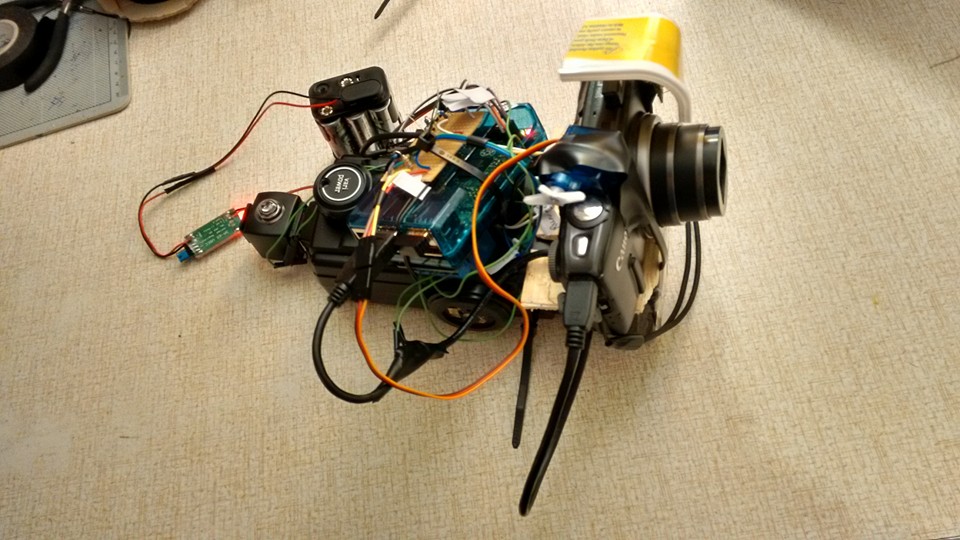
Version 1 – with compact camera
2016: Dalliance with Drones
I tried for a while to get the thing lifted by a drone, but it’s quite heavy, and the drone is an additional hassle (with limited air time, etc). After much faffing about with them I decided to switch back to a tethered balloon.
2017: Version 2; better camera & software
Thanks to a second grant from the Socially Enterprising Researcher grant, here at the university of Sheffield, I was able to buy a smartek gcc2062m camera (which can be triggered with a high to a pin), and has an electronic shutter.
I next developed two python software components;
- A module to locate the retroreflector in a pair of images.
- A module to control the camera data, the camera trigger, the detection algorithm and a web interface to the system.
Here’s a screenshot of an earlier version.
2018: Testing
An initial test of the new system, over a distance of about 23m worked very well. However the range tested needs increasing, and a smaller retroreflector needs testing (currently it’s 1cm^2).
I also want to add code that filters the retrodetection image to find only peaks (rather than other structures). Later I’ll include a particle filter to track the target between images. Currently each image is processed separately.
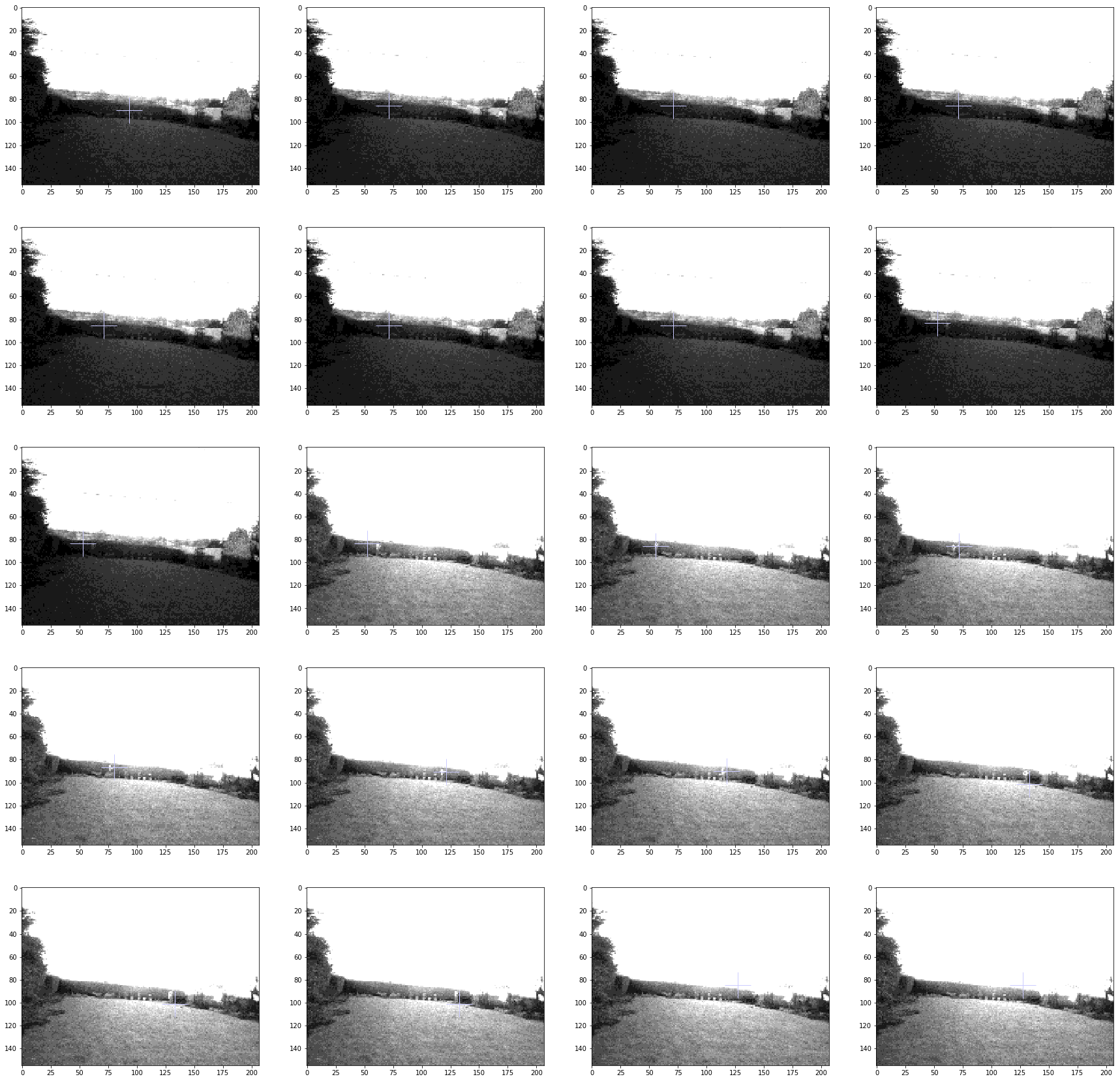
Twentry images showing retroreflector being tracked: First 9 images – reflector was attached to hedge at + mark. Following 7 images, I carry it across the image. One image it’s placed on the ground, with the last two attached ontop of the hedge.

Version 2: With new camera, flash, and no relays or servos.
Smoking flash
I tried testing a greater range, but unfortunately the flash experienced a catastrophic failure and started smoking… I’ll buy a new flash and report back!
Update
With a new flash things are working well again. I had trouble with ensuring that it is well focused, so have added a few more controls to the interface to see a ‘zoomed in’ central part of the image:
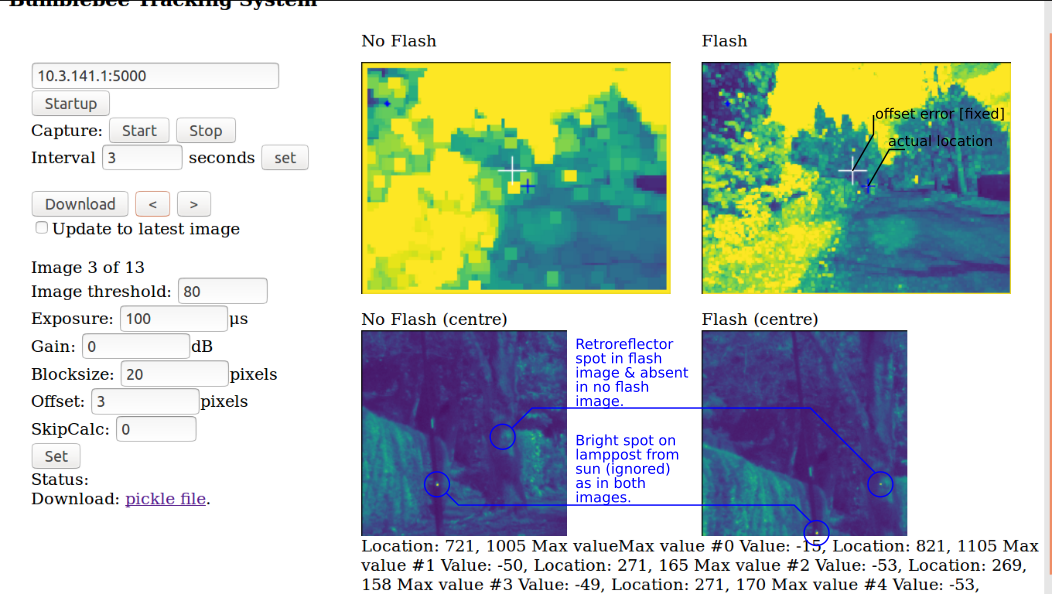
Latest Interface. Click for full-size image.
The above test was from about 40m. We’ll soon test at 80m.
I’ve also ordered a canister of helium (£118!) to collect next Monday. And hopefully will be testing it out on a balloon in the next few weeks.